3D object detection with Lyft self-driving car data
This is my attempt of a past Kaggle competition Lyft 3D Object Detection for Autonomous Vehicles, using the concept of frustum-pointnet to solve this past Kaggle competition.
This is an example of the classifed results:
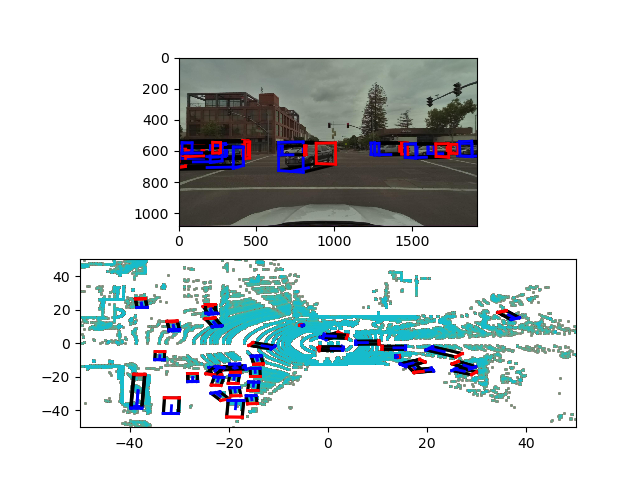
Result
This work is still in progress. The result does not seem too bad if …
more ...